
A DC motor is the core of all momentum and reaction wheels. If you apply a voltage a, current will be produced which will cause the wheel to change speed. At the same time, the back electromotive force (EMF) will build up, eventually driving the motor torque to zero.
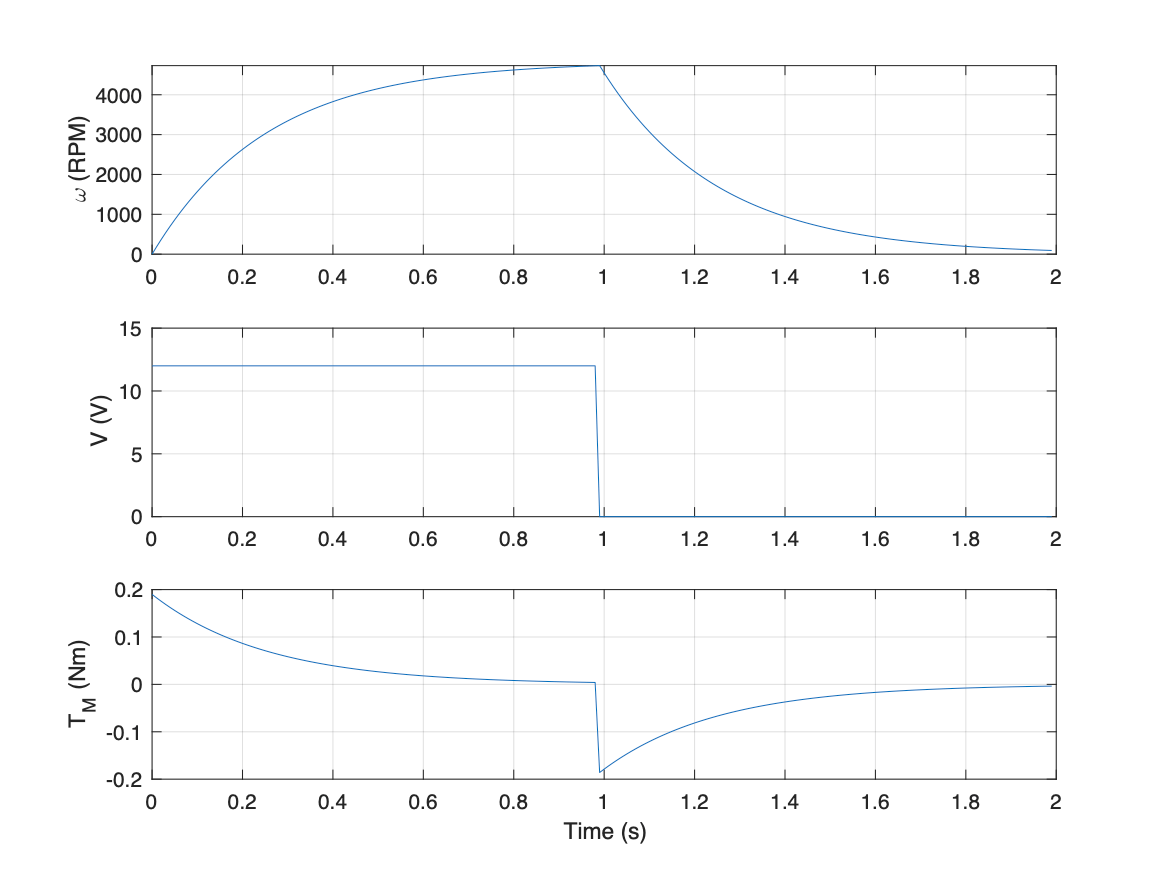
This is evident from the dynamical equation for a DC motor.







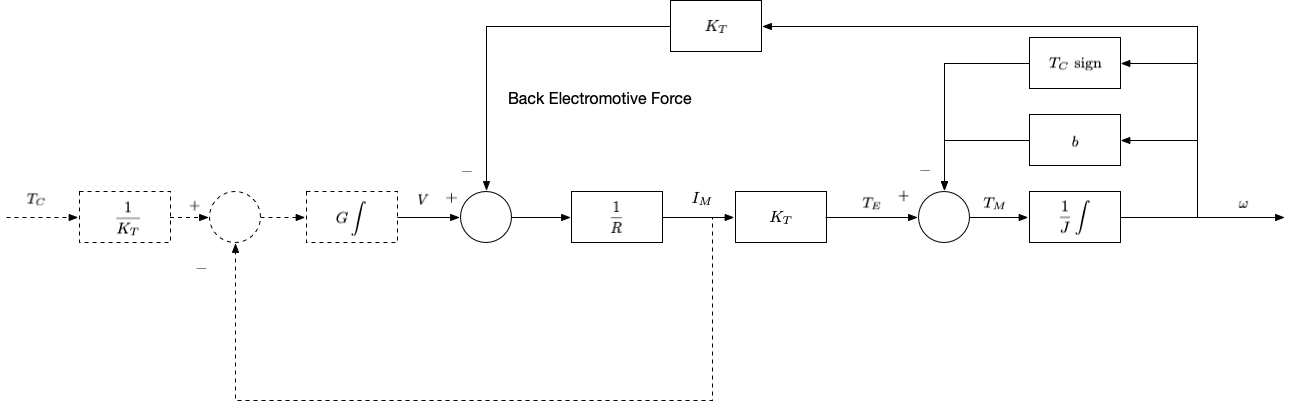
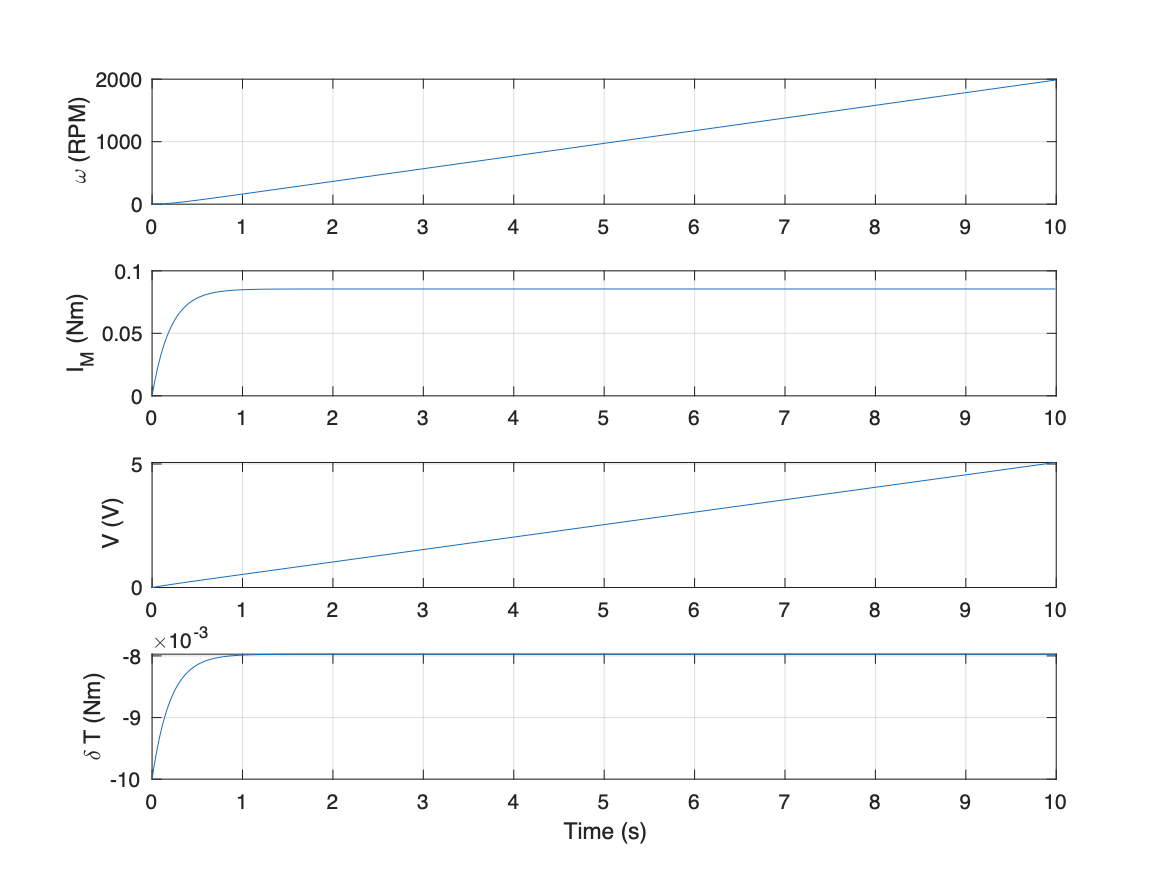
You can turn this into a reaction wheel by adding current feedback as shown in the following block diagram.



Leave a Comment