
Abstract
Solar energy from photovoltaic (PV) is among the fastest developing renewable energy systems worldwide. Driven by governmental subsidies and technological development, Europe has seen a fast expansion of solar PV in the last few years. Among the installed PV plants, most of them are situated at the distribution systems and bring various operational challenges such as power quality and power flow management. The paper discusses the modelling requirements for PV system integration studies, as well as the possible techniques for voltage rise mitigation at low voltage (LV) grids for increasing PV penetration. Potential solutions are listed and preliminary results are presented.
Similar content being viewed by others


1 Introduction
Solar energy is the most important natural energy source to the world. The total solar energy absorbed by Earth’s atmosphere, oceans and land masses is approximately 3850000 exajoules (EJ) per year, which means one hour of the energy from the sun is more than the total world consumption in 2011 [1, 2]. Solar photovoltaic (PV) power generation utilises solar panels comprised of a number of solar cells containing a PV material. Driven by the advancement of the generation technology and the ever decreasing technology cost, as well as the increase of electricity prices, a steep deployment of solar PV has been seen in recent years. The installation capacity worldwide increased more than 10 times since 2007, and reached 100 GW in 2012 [3], which is after hydro and wind power, the third most important renewable energy source in terms of installed capacity [4]. According to recently published reports by the United Nations Environment Program (UNEP) in 2012, 57% of the investment in renewable energy worldwide flew into solar [5].
In Denmark, though wind energy has been a primary focus area, it has seen a fast deployment of solar PV in the last two years. With only total 16.7 MW installed by 2011, the capacity increases to 391.7 MW by the end of 2012, and approximately 574 MW by today. The trend would continue in the next few years, especially for the small- and medium-sized PV plants, given the ever increasing electricity price and decreasing technology cost.
Followed by PV adoption is grid integration. With high amount of PV installed, the variable PV outputs bring issues on the supply security. In addition, a large part of the installation takes place in the low voltage (LV) residential areas, where the grids are not initially prepared for interconnecting generation units. Issues such as voltage quality, congestion, efficiency, are emerging. Two main alternatives are available for those issues, network reinforcement and smart grid technologies. The solution of network reinforcement may involve large change of the network including the LV substations and lines, which is not a favored solution currently by the utilities as to its cost and inflexibility. Instead, the recent development in smart grid technologies, featured by the application of information and communications technology (ICT), advanced metering infrastructure, demand side management and virtual power plants, provides other possibilities to mitigate the solar PV impact. Several projects have been launched in EU in recent years to investigate these opportunities [6–8].
The ever increasing solar PV capacity naturally substitutes the traditional fossil-fueled generation plants. Those traditional plants, besides supplying the demand, deliver various ancillary services to maintain the operational security. With the increasing of solar PV in the system, the operational services delivered by those traditional plants, consequently, are transferred to the new PV plants. On the other hand, thanks to the recent advancement of solar inverter technologies, solar PV is able to provide system services by varying power outputs under different conditions.
The discussion in the paper focuses on an important PV integration issue in the current distribution network, namely the voltage rise problem. Upon this, different solutions developed in PVNET.dk project [6], ranging from active and reactive power controls are presented. The paper is organised as the following. The project background is presented in section 2. Section 3 describes the nature of voltage rise problem and its control. Section 4 discusses the modelling requirement for voltage rise mitigation. From section 5, different solutions are discussed and the results are presented sequentially.
2 PVNET.dk project
The background of the PVNET.dk project is PV Island Bornholm Phase I-III project [8], which in total has a target of installing around 10 MW PVs in the island of Bornholm corresponding to 20% of the peak demand. Currently, the installed capacity of PV plants is around 6.2 MW, which corresponds to 11% of the peak demand 55 MW of the island [9]. This is close to the European Photovoltaic Industry Association (EPIA) goal of 12% PV power for entire Europe in 2020. The target of PVNET.dk is to study how to integrate large amount of PVs into the network, without having to reinforce the network. The project includes the aspects of research, development and demonstration. The project uses the Bornholm system as the background system and testing bed for development and demonstration of the solutions.
The project partners include research Technical University of Denmark, PV inverter manufacturer Danfoss Solar Inverters, PV project developer Energimidt and Bornholm distribution system operator Østkraft.
The research work can be divided into the following four parts.
1) PV impact studies on electric distribution grids
This part studies the energy balance, frequency stability and voltage security in a grid with increasing PV penetration. For energy balance study, the project developed unit commitment models to handle the volatile renewable generation as well as the demand such as electric vehicles (EVs). The frequency stability study investigates the grid frequency quality in a given period based on time series simulation. The study on voltage security focuses on the voltage rise problem at the LV grid. This is a well-known problem in many distribution grids with PV installations. Besides, the voltage unbalance problem caused by single phase PVs is also investigated.
2) Ancillary services required from the PV converters
The standards and grid connection codes require PV inverters to provide a number of ancillary services to aid the grid operation, such as frequency response and reactive power provision. The standards to be followed include FGW TR3, IEC 61400-21 and ENTSO-E [10–12]. The project also looks at the possibilities of developing new ancillary services into the inverter to help the grid operation.
3) Laboratory development for testing and validation
The laboratory work is a significant part of the project. This work includes inverter testing platform development, which characterizes the inverter under different operational conditions, e.g. frequency variation, voltage dips, to conform to the latest standards and grid codes. In addition, the work develops inverter communication solutions in order to remotely poll the measurements and set control signals when the inverters are rolled out in a real grid, for implementing and validating the solutions developed.
4) Applying smart grid functionalities to PV units
The project also aims to incorporate new smart grid functions into the inverters. This part of work is in cooperation with other smart grid projects in Denmark. For example, inverter may have price response capability when it is operating in the market.
The discussion in this paper will focus on the studies and results on voltage rise issues in PVNET.dk project. The work is also related partly to the ancillary service studies.
3 Voltage characteristics at LV networks
Voltage control is a critical issue for large scale PV integration in the LV grids. The resistivity of the residential LV grids makes the voltage control differs from high voltage (HV) transmission systems.
Considering a simple network as shown in Fig. 1, ignoring the charging effect of the line, in HV system, the magnitude of the resistance is much smaller than the reactance, whilst it is an opposite situation in LV grids. In Fig. 1, considering receiving end voltage vector \(\dot{V}_{T}\) is at standard position, the expression of the voltage drop across the line is

Comparing the voltage drop characteristics at HV transmission and LV grid due to X/R ratios
In HV systems, as to the high X/R ratios, the voltage drop can be expressed by ignoring the resistance effect,
where \(\left| {\Delta \dot{V}} \right|\) can be approximated by ignoring the effect of imaginary component \({{PX} \mathord{\left/ {\vphantom {{PX} {V_{T} }}} \right. \kern-0pt} {V_{T} }}\). In LV systems, due to the lower X/R ratios, the effect of resistance is no longer negligible, and the assumptions taken for HV systems are no longer valid. This difference is also illustrated in Fig. 1. Ignoring the imaginary part of (1), \(\left| {\Delta \dot{V}} \right|\) in LV system may be approximated by
The total derivative of \(\left| {\Delta \dot{V}} \right|\) with respect to power transfer is
From (4), it can be seen that an increment of active power transmission will automatically increase voltage difference; while by applying negative reactive power increment, this voltage magnitude difference may be reduced. For a system with PV installations, PV can be seen as the generator at the sending end of Fig. 1 with voltage \(\dot{V}_{S}\), while the receiving end is the upstream system. If PV is injecting power into the system, ignoring the losses on the line, the power is the same seen at the receiving end, thus the discussion above explains exactly the voltage rise issue and the possible control strategies.
In general, the impedance in Fig. 1 can be viewed as the Thevenin impedance seen from the PV inverter, where the receiving end represents the system. To mitigate the voltage rise issue at the sending end, assuming Z and system side voltage \(\dot{V}_{T}\) constant, two ways can be seen from (3): ① Reduce active power injection; ② Apply negative reactive power injection.
The effectiveness of each method is however dependent on the X/R ratio of the Thevenin impedance, which can be seen from (4). The actual voltage difference across the line is dependent also on the actual values of X and R, as shown in (3). In order to design proper control strategy, it is of interest to study the Thevenin impedance of the distribution systems to design or select proper control methods.
4 Models for PV integration studies
The study of renewable integration requires a viable model of a renewable system for researchers, grid operators and manufacturers to investigate the grid behavior and impacts from PV installations. The models of distribution grid include two types, static and dynamic models. The static model is useful in the study of power or energy flows in the network, whereas the renewable generation plants are seen as static power or energy sources. Such a model may or may not include the grid constraints however dependent on applications. A dynamic model is required in control design and transient behavior studies, where the model includes the network, generating units and their controls, and protective relays for protection system studies. Discussion here is given on the dynamic models as to the focus of voltage control.
4.1 Modelling of the grid
A large portion of installed PVs is situated at residential grids. At this level, the network components include the LV grid, solar PV plants, loads and a LV transformer. LV grid, including the LV transformer, may be modelled as detailed as possible to study the PV impact under both balanced and unbalanced situations. The upstream system, since it usually has much larger capacity than the LV grid, can be simplified by Thevenin equivalent, where a method to obtain the impedance is Z-bus matrix, the inverse matrix of the admittance matrix. Given a system with n buses, the relation between the bus voltages \(\dot{V}\) and current injection \(\dot{I}\) is
The diagonal element Z ii represents the network impedance seen from the bus i. It is worth noting that comparing to load flow calculations, the admittance matrix here should also consider the internal impedances of generators and loads if possible. This method can also be extended to handle unbalanced system calculation where each phase is calculated separately. As a static method, the accuracy is restrained due to the ever-changing system operating conditions.
Another method to obtain the Thevenin impedance is measurement based, where the system impedance is approximated by measuring the local voltage difference via varying load levels [13]. Though the method is easy to implement, it is often inapplicable to be applied to all the buses in a distribution system due to the enormous number.
4.2 Solar PV plants
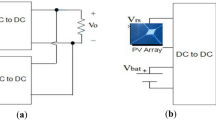
Dynamic model of PV plants are required for modelling the PV controls. PV system is by nature a controlled current source, where different electrical control strategies are incorporated to modulate the active and reactive current outputs. The model of power electronics can be simplified to increase the computational efficiency. Fig. 2 shows an example structure of a standard PV system model.

Model structure of a PV plant
The electrical control system includes an active and a reactive power control loop. The current manufacturing standards of PV inverter have defined the basic electric characteristics for grid connection to that inverters need to conform [10, 11, 14]. The grid connection requirements are further elaborated by different countries. For active power control, a key requirement is the power/frequency responses, where inverters are required to reduce their production when the system frequency is over a threshold. As an example, BDEW requires PV inverter to reduce the power output at a rate of 40%/Hz when the frequency is between 50.2 Hz and 51.5 Hz, while recover the production when the frequency back to 50.05 Hz [15].
Inverters above certain capacity are required to have reactive power capabilities [10]. ENTSO-E newly redefines the network code on the requirements of generation power plants, which indicates the PQ operational region with respect to voltage magnitudes [12].
Inverters can have the following reactive power functions.
-
1)
Fixed reactive power setpoint
-
2)
Fixed power factor setpoint
-
3)
Power factor (PF) as a function of active power PF(P)
-
4)
Reactive power as a function of voltage Q(U)
Inverters with small capacity may only have setpoint control capability, while larger units are usually capable of all the four control functions. Examples of PF(P) and Q(U) curves are shown in Fig. 3. It is worth mentioning that the exact shape of the curve may be based on different operational situations. As shown in Fig. 3 Q(U) curve, instead of a single droop, an additional point Ux, Qx could be added to the lower part of the curve to differentiate the responses of the PV plants whose terminal voltages are close to the reference with the plants whose voltages are higher. This balances the reactive power contributions from the PV plants close to the LV transformer and the plants at the far end of the feeder.

Examples of PF(P) and Q(U) control curves
Grid connection requirements also define inverter characteristics under abnormal LV situations such as grid faults. For certain studies in protection and dynamic voltage support, this feature should also be included in the inverter electric control model.
5 Voltage control strategies
In this section, the voltage control strategies are presented in detail. As aforementioned, the effectiveness of voltage control by active or reactive power is dependent upon the R/X ratio. In real world, the X/R ratio can vary from grids to grids. The actual choice of the control method should be based on the real grid conditions, such as X/R ratio and the actual X, R values. For completeness of the discussion, algorithms developed on both methods are discussed here.
5.1 Via active power
An obvious method to mitigate the voltage rise is via reducing the active power injection to the grid. As LV feeders usually have R/X ratio higher than 1, by (4), the active power method is more efficient than reactive power for voltage regulation purposes [16]. Among the various technologies proposed in literature, the basic ideas are two: ① local consumption increase; ② PV power curtailment. The local consumption can be adjusted through introducing load management or components such as storage systems. As PV power curtailment is not a favorable method for the loss of free energy, the discussion is hence focus on the first option.
5.1.1 PV with electrical energy storage systems
By applying electrical energy storage systems (EESS), PV plant output can be reduced through EESS charging during the peak production period, thereby keeping the LV feeder voltage stable. The energy stored by EESS can be used later to supply the demand. In addition, EESS can smooth out the PV power fluctuations and provide operational reserves to the system. Commercial solutions as such have been developed in the market [17].
The implementation models of EESS at a LV feeder can be: ① decentralised storage systems installed with PV plants; ② centralised storage station for the whole LV feeder; ③ mix of above two options. Nevertheless, the main technical question of using EESS is to determine the charging power for voltage regulation purposes. Studies have shown that the most efficient place of EESS is at the end of the feeder [18, 19], where the required charging power of EESS is minimal.
A mathematical formulation using mixed-integer optimisation for charging power minimisation is
where \(P_{i}\), \(V_{i}\) are the charging power and voltage of the feeder bus i where storage system interconnects. The integer variable makes the formulation applicable either for operation, determination of minimum charging power; or planning, determination of locations of storage systems. To check the voltage constraint, it usually needs solving nonlinear power flow equations to obtain voltage magnitudes. In [18], this constraint is simplified by a set of linear equations using first order Taylor expansion between voltage and power injection:
where \(|V|_{0}\) is the voltage magnitude at the base case. The first order derivatives can be obtained from the inverse matrix of the last iteration Jacobian in Newton-Raphson load flow calculation.
With EESS, the PV outputs can be reduced at a desired level. Technically, the energy requirement of storage systems is related to the PV generation, implementation models and operational strategy. Sizing of EESS involves optimisation across multiple time scales with different criteria, and different solutions can hereby result.
5.1.2 PV with electric vehicles
An emerging demand in LV grids is EVs. EVs can work as a storage device when connected to the grid.
As demonstrated in [19], EV charging, which first may appear as an additional load to the grid, can be used as an effective storage solution. In the grids with PV, EVs represent a unique opportunity, as not only they can locally consume part of the produced PV energy, yet this energy reduces the charging energy from the grid and gives additional travel range for EV drivers. For an average size EV with a 24 kWh battery, the charging process can show an additional demand of about 3.7 kW with a single–phase charging option. EV charging, with coordination to PV generation, can help to mitigate the voltage issues.
PV and EV can be incorporated in different ways. For house charging, a simple solution could be modulating the EV charging power by the grid voltage, where EVs apply more charging power when PV production and voltage are high while opposite when production and voltage are low. If the EV charging is regulated by aggregator, then more advanced control strategy can be applied using ICT technologies. For residential charging, a higher number of EVs is required to obtain equivalent voltage rise mitigation effects when the charging location is close to the LV transformer. On the contrary, smaller charging load is required with a station locating near the feeder end.
If we consider a public charging station, with the possibility to accommodate the parallel charging of several vehicles, this can be ideally seen as a grid-connected battery; the charging load due EV parallel charging can cope with high PV generation, by activation from a centralized position. The study performed in [19] shows that an example European radial feeder may be able to accommodate more PV without the need of grid reinforcement, but only with coordinated EV charging.
However, the use of EV charging for voltage regulation corresponds to a particular type of active power management, which necessarily relies on EV availability and the uncertainty on solar irradiation.
With the use of controlled charging, a new figure, the one of a local EV fleet operator, can make effective use of the EV load, by handling locally statistical information such as daily EV charging patterns and PV generation forecasts.
5.2 Via reactive power
Reactive power is another option for voltage regulation. Unlike active power, reactive power method exploits the capability of inverters without the need of additional devices. Though may not be as efficient as active power method at LV grids, it may be in favor of the customers as neither PV production curtailment nor additional investment are required, unless with compensation. However, as additional reactive power could induce additional reactive current in the grid, additional grid losses results especially at high PV penetration levels [20, 21].
Inverters above certain size are capable of providing certain amount of reactive power even at nominal active power output [12]. The control parameters of inverters can be set either individually by empirical approaches, or by certain coordination. The characteristics of reactive power provision are defined by the selected control method and its parameter settings.
The setting of reactive power control can be dependent on the PV production and the resulted voltage. Considering the possible extra losses in the network as well as possible congestion issues, the objective of coordination may be a compromise of the three objectives.
where V i and V ref are the voltages at the i th PV plant terminal and preferred reference voltage, respectively, V ref can be set according to the LV transformer setting, and usually is 1 pu; P loss the total power losses in the system; S i and S i max the actual flow and the maximum flow on section i of a LV feeder; c 1, c 2 and c 3 positive scalar representing the weighting of each objective; and k the number of PV generation and load scenarios considered in the optimisation.
Subject to (8), the performance of different control settings should be evaluated under different PV production and load scenarios, and time series simulation may be required to obtain a general performance of the settings. The above formulation can be deployed to tune the parameter settings, and the setting that provides overall best performance can be selected.
In implementation, by the above formula, a group of PV inverters can thus be coordinated and run together as a ‘Solar Virtual Power Plant’ to realise voltage regulation at a LV feeder, or even a larger distribution area.
6 Case studies
This section presents preliminary voltage control results from both active and reactive power methods presented above. The studies use example LV grids from Europe with three phase feeders and literals. The methods are also generally applicable to single-phase installations if unbalanced operation is considered.
6.1 Active power control
First of all, a comparison of using active and reactive power for voltage regulation is done using an example Belgian grid from [18] with 33 households and 9 roof-mounted PVs. The results build on the work presented in [19]. Time series simulations are performed based on 1 year generation and load profiles, highlighting the need of voltage regulation in 98 days. The study is under maximum generation and low load conditions. The objective of the control is to have the voltage along the feeder under a normal range.
Figure 4 shows the minimum required active power reduction at the different locations, related to the charging power from EESS or the number of EVs considering 3.7 kW as normal EV charging power. The results verify again that the most efficient place for voltage regulation is at the end of the LV feeder, where the least active power is required.

Comparison of the needed active and reactive power for voltage control
The required active power in Fig. 4 considers only one place at each time for voltage regulation. Therefore, the values represent the maximum power required at each bus. If more than one bus along the feeder is possible for supplying voltage regulation, the minimum required active power at each bus will be less than the value given. The determination of the energy level of EESS varies from different operational strategies. In reality, planning of EESS will be a compromise between economic and technical considerations, while voltage regulation is one of the benefits obtainable from EESS.
For a simple comparison, in Fig. 4, similar simulation is also performed using reactive power control to achieve the voltage regulation, where the least reactive power capacity is obtained at different locations. Similar as active power, the most efficient place for reactive power compensation is at the end of the feeder. Comparing to the active power results, it can be seen that the amount of required reactive power is approximately 3 times more than active power, which closes to the R/X ratio of the network.
The LV network in the study uses standard NA2XRY 4-core LV cables. Though the cable size varies from 95 mm2 to 150 mm2, the R/X ratios are around 4. Given by (3), to obtain the same |∆V|, the Q/P ratio will be in exact proportion as R/X ratio.
It is worth mentioning here that in real world, the system is more complex than the one in Fig. 1. Fig. 1 is only a two-bus system that all the P and Q injected from the source side can pass through the whole line to the other end. In reality, the LV feeders have usually more than one literal, and connected with loads. The injected P and Q can often be absorbed along the feeder in case there are loads surrounded. The created |∆V| is therefore reduced too since less impedance the power flow goes through. To create the same amount of |∆V| at a point in the system, the Q/P ratio is then varying dependent on the flow patterns as well as the place of injection. The study in the paper is based on low load conditions; therefore the results are close to the R/X ratio of the grid.
6.2 Reactive power control
An example case is implemented on a LV grid from the Danish island Bornholm. The grid contains 71 households with two LV feeders supplied by one MV/LV 100 kVA transformer.
The two feeders, feeder 1 & 2, contain 52 and 19 consumers respectively, with an interconnection cable in between. The interconnector enhances the reliability of the supply and stays open under normal operation. The grid topology and installed PV inverter sizes are shown in Fig. 5. More parameters of the system can be found in [21].

An example LV grid from Bornholm
The case studies include two parts. The first part of the study uses typical settings of PF(P) and Q(U) functions without any optimisation, where in the second part the parameters of PF(P) and Q(U) are optimised and compared. The first case study aims to compare the PF(P) and Q(U) methods in a general form at different PV penetration levels with 1-year production and consumption data sets used in time-series simulations. The second study illustrates a simple coordination of reactive power control to achieve a set of optimal parameter values given typical production and consumption values of the feeder. The two study results are not directly comparable as different datasets were used; however both together provide a general idea of how to choose different controls and how to set parameters under different situations.
The definition of PV penetration used here is
where S PV feeder is the installed PV power under the feeder; n loads the number of customers down the feeder, in this case is 71; and S r an estimated maximum PV power at the feeder. In Denmark, a usual installation size for non-commercial residential users is around 4~6 kVA. Here 5 kVA is selected as the reference size. By (9), 100% PV penetration means all the users in the grid have 5 kVA PV installed, corresponding to 355 kVA. The studied penetration levels range from 0 to 60% in step of 10%, corresponding to PV installation from 0 kVA to 3kVA at each household.
6.2.1 Without coordination
The data for setting up time-series simulation include PV production and residential user consumption. The electrical energy consumption of a residential household in Denmark is obtained from a typical year at total energy consumption of 3.44 MWh. The PV generation is formulated considering the worst scenario, where all the houses are assuming inclining 45˚ south for most possible solar production. A typical production curve of 1 kW PV under clear sky in a summer day is used as a reference to obtain the production curves over one year 365 days. The production curves are scaled to represent different penetration levels. More information on data preparation can be found in [20].
The parameters of reactive power control are listed in Table 1. For the sake of brevity, only simulation results on feeder 1 are given, seen Figs. 6–7. Same conclusion can also be drawn from the results of feeder 2. It can be found that feeder 1 are likely to have voltage issue, and the PV penetration level given default PF(P) can maximum reach 30% to 35% percent considering all the households install same amount of PV. With Q(U) method, the voltage is better regulated and the penetration level can go up to 50% without any voltage problem. Apparently, the advantage of Q(U) over PF(P) comes from more reactive power contributions to the voltage regulation, and hence induce more system losses.

Maximum voltages along feeder 1 via PF(P) method

Maximum voltages along feeder 1 via Q(U) method
A general conclusion can be, given low penetration of PV installations where voltage quality is not a major concern, PF(P) method can be more appropriate choice over Q(U).
6.2.2 With coordination
To coordinate the control parameters according to (8), nonlinear optimisation technique is required to tune the parameters. In this work, the problem is solved via genetic algorithms (GA), where the parameters of the controllers are tuned based on the below objective function,
where the first and second items represent the voltage deviation and power losses respectively. The last three items penalise the over limits of voltage, reactive power generation, and line flow. The optimisation variables for PF(P) and Q(U) are given in Table 2.
As the voltage, power losses in (10) are instantaneous quantities, to evaluate the control parameter efficiency over a time period, certain procedure of evaluation is required.
Step 1: Import solar production and load scenarios by performing time series simulations, export the results on bus voltages, power losses, line flows, reactive power outputs from solar plants, at a given time resolution.
Step 2: Find out the worst voltage value, and then calculate the accumulated energy loss over the simulation period.
Step 3: Evaluate the variable overlimits by using the worst values during the simulation.
Step 4: Calculate the objective function.
Details of the objective function can be found in [21]. The results from the coordinated case are listed in Table 3. The voltage profiles along the feeder are shown from Figs. 8–9.

Maximum voltages along feeder 1 via PF(P) method

Maximum voltages along feeder 1 via Q(U) method
As shown from Fig. 8, with the coordination, the PF(P) method can merely control the voltages within the safety band when PV goes up to 60% penetration level. Q(U) method still outperforms the PF(P), which gives same conclusion as in the previous case without coordination. It is worth mentioning that the results from the two cases are not fully comparable, as to different assumptions and scenarios taken in the studies. However, in terms of the voltage rise, both cases comprehend a scenario in which PV generation is high and demand is low. It can be concluded that the coordination of reactive power control can efficiently increase the PV penetration level.
7 Conclusion
Voltage control is one of the urgent issues in distribution systems for solar PV integration. Many LV networks have been designed decades ago, and are not well prepared to accommodate the large amount of power flowing through the grid. This paper describes the mechanism of the voltage rise issue, and the possible mitigation solutions.
The paper summarises the voltage rise mitigation methods developed in PVNET.dk caused by PV installations. Both active power and reactive power measures are discussed. Technically, the design of the solution is dependent on the grid impedance characteristics and the flow pattern, as well as the efficiency of the entire feeder. It is worth mentioning that the grid characteristics can be quite different, and a single method may not always work efficiently. In practice, it also needs to be considered the operation environment such as regulation and legislation.
It is worth mentioning that the discussed methods are originally designated to 3-phase systems, though the same concepts are well applicable to single-phase distribution networks. For 3-phase systems, more sophisticated controls can be developed based on the solutions discussed here. For example, it is not uncommon to see that overvoltage in a 3-phase LV system only occurs at one phase, instead of all the phases, due to significant amount of single-phase PV systems installed as well as the existing unbalance on the load. In that case, the control should be designed not only considering a balanced situation and simply reacting upon an average voltage of the 3 phases, but rebalance the three phases to accommodate more PVs in the system.
References
Key world energy statistics (2013) International Energy Agency, Paris
Solar Energy (2014) Wikipedia. https://en.wikipedia.org/wiki/Solar_energy. Accessed 3 Jan 2014
Global Status Report (2013) Renewable Energy Policy Network for the 21st Century (REN21), Paris
Gaëtan Masson G, Latour M, Rekinger M et al (2013) Global market outlook for photovoltaics 2013–2017. European Photovoltaic Industry Association, Brussels
PVNET.dk (2014) http://www.pvnet.dk/. Accessed 3 Jan 2014
European energy demonstration projects (2014) European commission. Brussels, Belgium
PV Island Bornholm, ForskEL (smart grid project) (2014) OpenEI, United States Department of Energy, Washington, DC, USA
Statistik og udtræk for VE anlæg (2014) Energinet.dk, Erritsø
Technical guidelines for power generating units (2010) Part3: Determination of electrical characteristics of power generating units connected to MV, HV and EHV grids. FGW e.V.—Fördergesellschaft Windenergie und andere Erneuerbare Energien, Berlin
Fo¨rdergesellschaft Windenergie und andere Erneuerbare Energien Std, Rev 21, March 2010
IEC 61400-21:2008 Wind turbines—Part 21: Measurement and assessment of power quality characteristics of grid connected wind turbines. 2008
Network code on requirements for grid connection applicable to all generators (2013) European Network of Transmission System Operators for Electricity (ENTSO-E) Standard
Borcherding H, Balzer E (2009) Mains impedances in the frequency range up to 20 kHz. Labor Leistungselektronik und Elektrische Antriebe, University of Applied Sciences, Mainz
IEEE Std 1547-2003 IEEE standard for interconnecting distributed resources with electric power systems. 2003
Technical guideline (2008) Generating plants connected to the medium-voltage network. Bundesverband der Energie-und Wasserwirtschaft e.V. (BDEW), Berlin
Yang GY, Mattesen M, Kjaer SB, et al (2012) Analysis of Thevenin equivalent network of a distribution system for solar integration studies. In: Proceedings of the 3rd IEEE PES international conference and exhibition on innovative smart grid technologies (ISGT Europe), Berlin, Germany, 14-17 Oct 2012, 5 pp
Blažič B, Papič I, Uljanić B et al (2011) Integration of photovoltaic systems with voltage control capabilities into LV networks. In: Proceedings of the 1st international workshop on integration of solar power into power systems, Aarhus, Denmark, Oct 24, 2011, 8 pp
Marra F, Yang GY, Traeholt C et al (2013) EV charging facilities and their application in LV feeders with photovoltaics. IEEE Trans Smart Grid 4(3):1533–1540
Marra F, Yang GY, Fawzy YT et al (2013) Improvement of local voltage in feeders with photovoltaic using electric vehicles. IEEE Trans Power Syst 28(3):3515–3516
Constantin A, Lazar RD, Kjær SB (2012) Voltage control in low voltage networks by photovoltaic inverters—PVNET.dk. Danfoss Solar Inverters A/S, Nordborg, Denmark
Juamperez M (2013) Testing platform development for large scale solar integratio. Master Thesis, Technical University of Denmark, Kongens Lyngby, Denmark
Acknowledgment
This work was supported by PVNET.dk project sponsored by Energinet.dk under the Electrical Energy Research Program (ForskEL, grant number 10698).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 13 February 2015
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
YANG, G., MARRA, F., JUAMPEREZ, M. et al. Voltage rise mitigation for solar PV integration at LV grids. J. Mod. Power Syst. Clean Energy 3, 411–421 (2015). https://doi.org/10.1007/s40565-015-0132-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-015-0132-0